為了在開環(huán)狀態(tài)下使步進(jìn)電機(jī)抵達(dá)更高的操控精度,這篇文章引進(jìn)離散化指數(shù)函數(shù)曲線操控步進(jìn)電機(jī)的發(fā)動(dòng)和中止進(jìn)程。經(jīng)過對(duì)初始頻率數(shù)組進(jìn)行優(yōu)化運(yùn)算,得到最高運(yùn)轉(zhuǎn)速度可變的加快曲線,并運(yùn)用單片機(jī)電路完結(jié)步進(jìn)電機(jī)的操控體系。試驗(yàn)結(jié)果標(biāo)明,該體系具有較高的操控精度,并降低了規(guī)劃本錢。
步進(jìn)電機(jī)是一種將數(shù)字脈沖量轉(zhuǎn)換為運(yùn)轉(zhuǎn)間隔或許旋轉(zhuǎn)視點(diǎn)的電氣器件。
在電機(jī)可接受的負(fù)載范圍內(nèi),電機(jī)旋轉(zhuǎn)的視點(diǎn)只收到脈沖個(gè)數(shù)的操控,電機(jī)運(yùn)轉(zhuǎn)速度只收到脈沖頻率的操控。因?yàn)殡姍C(jī)的運(yùn)轉(zhuǎn)的進(jìn)程中,運(yùn)轉(zhuǎn)間隔和運(yùn)轉(zhuǎn)速度與負(fù)載的改動(dòng)量無關(guān)(在規(guī)定的負(fù)載范圍內(nèi)),在一些操控簡略或需求低本錢的運(yùn)動(dòng)操控體系中,常會(huì)用步進(jìn)電機(jī)。運(yùn)用步進(jìn)電機(jī)最大的優(yōu)勢(shì)是:以開環(huán)的方式來操控方位和速度,大大降低了本錢。但因?yàn)樨?fù)載方位對(duì)操控電路沒有反應(yīng),步進(jìn)電機(jī)對(duì)就每個(gè)脈沖都有必要正確呼應(yīng)。假如脈沖頻率挑選不妥,步進(jìn)電機(jī)就不能移動(dòng)到新的方位。負(fù)載實(shí)踐方位相對(duì)于操控器所等待的方位呈現(xiàn)持久差錯(cuò),即發(fā)生失步表象或過沖表象。失步和過沖表象別離呈如今步進(jìn)電機(jī)發(fā)動(dòng)和中止期間。失步是指對(duì)某些脈沖沒有呼應(yīng)而沒有運(yùn)動(dòng)到指定的方位。過沖和失步相反,運(yùn)轉(zhuǎn)間隔超越了指定間隔。因此,在步進(jìn)電機(jī)開環(huán)操控體系中,有必要避免失步和過沖,步進(jìn)電機(jī)才干依照操控進(jìn)行精準(zhǔn)的走位。
通常步進(jìn)電機(jī)的發(fā)動(dòng)頻率比較低,而體系的運(yùn)轉(zhuǎn)速度則需求越高越好。假如步進(jìn)電機(jī)運(yùn)轉(zhuǎn)速度直接起轉(zhuǎn),則會(huì)因?yàn)槌霭l(fā)動(dòng)速度而發(fā)生堵轉(zhuǎn),電機(jī)不能發(fā)動(dòng)。體系抵達(dá)終點(diǎn)時(shí)當(dāng)即中止發(fā)送脈沖,令步進(jìn)電機(jī)當(dāng)即中止,因?yàn)閼T性的效果,步進(jìn)電機(jī)中止方位則會(huì)超出體系預(yù)期方位。
為了使步進(jìn)電機(jī)在運(yùn)轉(zhuǎn)進(jìn)程中不會(huì)呈現(xiàn)失步和過沖表象,在電機(jī)的發(fā)動(dòng)和中止期間,應(yīng)該參加合適的加減速操控。
1. 加減速曲線的挑選
步進(jìn)電機(jī)的加減速曲線通常有三種,別離為階梯型、直線型、指數(shù)型。
指數(shù)型加快曲線在發(fā)動(dòng)時(shí),加快度最大,隨著速度的添加,加快度逐步減小,當(dāng)速度抵達(dá)運(yùn)轉(zhuǎn)速度時(shí),加快度降至最低。指數(shù)加減速曲線最契合負(fù)載轉(zhuǎn)矩的改動(dòng)狀況,合適各種狀況下的步進(jìn)電機(jī)運(yùn)用。
其中vm為步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的發(fā)動(dòng)速度,v0為步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)的最高速度,τ為時(shí)刻常數(shù),依據(jù)試驗(yàn)來斷定其值的巨細(xì)。
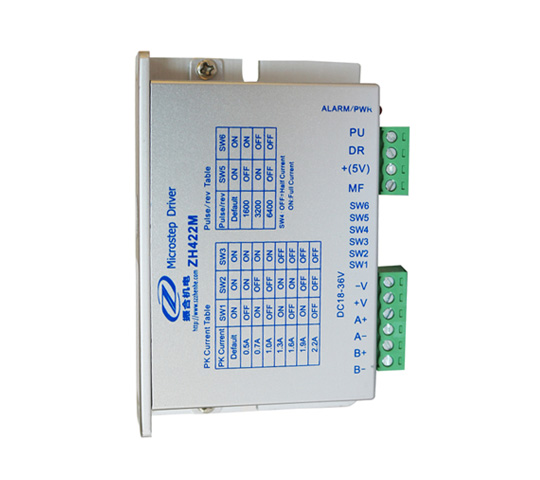
2. 操控器的硬件電路
按鍵電路負(fù)責(zé)現(xiàn)場操控電機(jī)的方位;而紅外接納電路經(jīng)過接納紅外線發(fā)射器的操控信號(hào),長途遙控電機(jī)的方位;顯現(xiàn)電路為了顯現(xiàn)當(dāng)時(shí)電機(jī)所在的方位,便于丈量操控精度;限位開關(guān)為磁性觸摸開關(guān)構(gòu)成,為了避免電機(jī)運(yùn)轉(zhuǎn)超越約束方位;串行通訊接口為了給單片機(jī)發(fā)送電機(jī)的最高運(yùn)轉(zhuǎn)速度。
單片機(jī)選用德州儀器公司的MSP430F5438,該單片機(jī)的最大特點(diǎn)是運(yùn)轉(zhuǎn)速度快,功耗低,具有256K+512B的flash 存儲(chǔ)器,能夠用來存儲(chǔ)加快曲線數(shù)據(jù)。
3. 操控器的軟件算法
步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)速度是經(jīng)過接納脈沖的頻率來操控的。單片機(jī)經(jīng)過計(jì)時(shí)器的中止發(fā)生走步脈沖,所以能夠經(jīng)過改動(dòng)單片機(jī)計(jì)數(shù)器的初始值來改動(dòng)脈沖頻率。
將指數(shù)型曲線離散化后,改動(dòng)脈沖頻率,就能夠使步進(jìn)電機(jī)依照指數(shù)加減速曲線運(yùn)轉(zhuǎn)。經(jīng)過大量的試驗(yàn)數(shù)據(jù),當(dāng)τ=1.435時(shí),加快進(jìn)程較為滑潤。將加快進(jìn)程離散為200段,每段的時(shí)刻大概在25ms擺布。將此段電機(jī)運(yùn)轉(zhuǎn)的速度轉(zhuǎn)化為計(jì)數(shù)器初始值,并依據(jù)此段脈沖頻率計(jì)算出此段的脈沖個(gè)數(shù)。將每段的計(jì)數(shù)器初始值和脈沖個(gè)數(shù)固化為數(shù)據(jù)數(shù)組,在每個(gè)計(jì)時(shí)器中止中判斷是否完結(jié)該段進(jìn)程,即可完結(jié)加快曲線。
為了使電機(jī)的最高運(yùn)轉(zhuǎn)速度能夠依據(jù)外部設(shè)定而改動(dòng),如今只將初始加快曲線貯存在數(shù)組中,初始頻率值為:
依照該初始加快曲線,電機(jī)呼應(yīng)的最高頻率是1Hz。將期望電機(jī)運(yùn)轉(zhuǎn)的最高頻率fm經(jīng)過串口輸入單片機(jī),之后經(jīng)過計(jì)算出每段的運(yùn)轉(zhuǎn)頻率和脈沖個(gè)數(shù)。經(jīng)過以上規(guī)劃,就能夠使步進(jìn)電機(jī)依照指數(shù)型加減速曲線以最高頻率fm運(yùn)轉(zhuǎn),fm值能夠經(jīng)過外部設(shè)定而改動(dòng)。
4. 操控精度測驗(yàn)
操控電機(jī)每次走5mm,運(yùn)用50分度的游標(biāo)卡尺丈量每次走步電機(jī)運(yùn)轉(zhuǎn)的間隔。依據(jù)5次走步的間隔數(shù)據(jù),計(jì)算出走步精度。
經(jīng)過數(shù)據(jù),能夠得出,電機(jī)運(yùn)轉(zhuǎn)間隔的相對(duì)差錯(cuò)盡在0.04%,操控精度適當(dāng)高。
試驗(yàn)標(biāo)明,經(jīng)過參加指數(shù)型加減速曲線,使步進(jìn)電機(jī)在開環(huán)的狀況下抵達(dá)了很高的運(yùn)轉(zhuǎn)精度,大大降低了操控本錢。
5. 結(jié)束語
這篇文章經(jīng)過單片機(jī)及簡略的外部電路,完結(jié)了最高運(yùn)轉(zhuǎn)速度可變的步進(jìn)電機(jī)操控器。盡管該操控器運(yùn)轉(zhuǎn)在開環(huán)狀態(tài)下,可是因?yàn)橐M(jìn)了指數(shù)型加減速曲線,使得步進(jìn)電機(jī)的走步精度抵達(dá)了較高的水平,降低了設(shè)備本錢。
更多直線步進(jìn)電機(jī)參數(shù)知識(shí),請(qǐng)咨詢覃工QQ:176340526