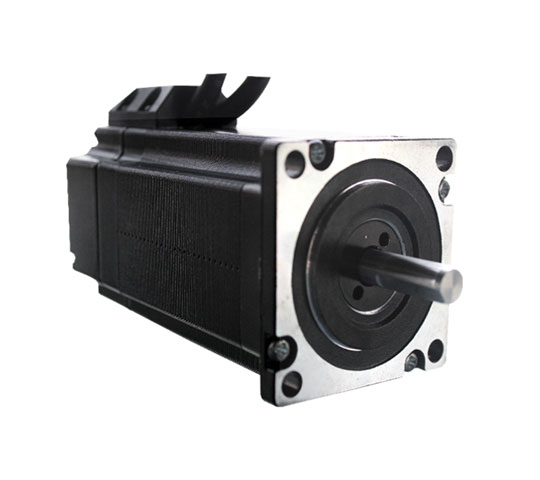
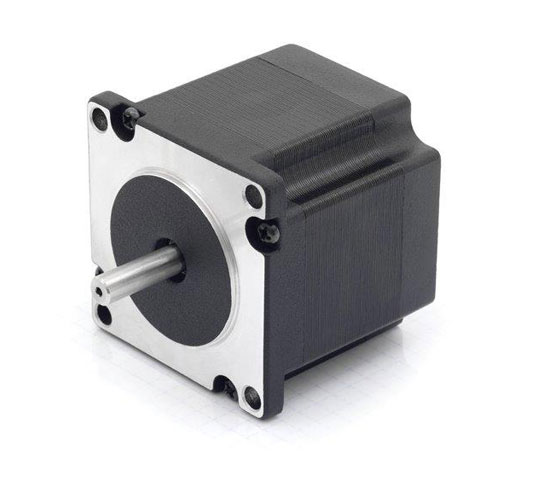
隨著微電子和核算機(jī)技能的開展,步進(jìn)電機(jī)的需求量日積月累,在各個(gè)行業(yè)的操控范疇都將有廣泛使用。 PLC 作為一種工業(yè)操控核算機(jī),具有模塊化結(jié)構(gòu)、裝備靈活、高速的處置速度、準(zhǔn)確的數(shù)據(jù)處置才能、PLC 對(duì)步進(jìn)電機(jī)也具有杰出的操控才能,運(yùn)用其高速脈沖輸出功用或運(yùn)動(dòng)操控功用,即可完成對(duì)步進(jìn)電機(jī)的操控。 關(guān)于那些在工作進(jìn)程中移動(dòng)間隔和速度均斷定的詳細(xì)設(shè)備,振合步進(jìn)電機(jī)工程師以為選用PLC 經(jīng)過步進(jìn)電機(jī)驅(qū)動(dòng)器來操控步進(jìn)電機(jī)的工作是一種理想的技能計(jì)劃。 步進(jìn)電機(jī)的特色:(1)步進(jìn)電機(jī)的角位移與輸入脈沖數(shù)嚴(yán)格成正比,電機(jī)工作一周后沒有累積差錯(cuò),具有杰出的跟從性。(2)由步進(jìn)電機(jī)與驅(qū)動(dòng)器電路構(gòu)成的開環(huán)數(shù)字操控體系,既十分簡(jiǎn)略、賤賣,又十分牢靠。一起,它也能夠與視點(diǎn)反應(yīng)環(huán)節(jié)構(gòu)成高性能的閉環(huán)數(shù)字操控體系。(3)步進(jìn)電機(jī)的動(dòng)態(tài)呼應(yīng)快,易于啟停、正回轉(zhuǎn)及變速。(4)速度可在適當(dāng)寬的范圍內(nèi)滑潤(rùn)調(diào)理,低速下仍能保證取得大轉(zhuǎn)矩。(5)步進(jìn)電機(jī)只能經(jīng)過脈沖電源供電才能工作,它不能直接運(yùn)用交流電源和直流電源。 步進(jìn)電機(jī)能呼應(yīng)而不失步的最高步進(jìn)頻率稱為“發(fā)動(dòng)頻率”;與此相似,“中止頻率”是指體系操控信號(hào)俄然關(guān)斷,步進(jìn)電機(jī)不沖過目標(biāo)方位的最高步進(jìn)頻率。而電機(jī)的發(fā)動(dòng)頻率、中止頻率和輸出轉(zhuǎn)矩都要和負(fù)載的轉(zhuǎn)動(dòng)慣量相適應(yīng)。有了這些數(shù)據(jù),就能有效地對(duì)步進(jìn)電機(jī)進(jìn)行變速操控。 選用PLC 操控步進(jìn)電機(jī),應(yīng)依據(jù)下式核算體系的脈沖當(dāng)量、脈沖頻率上限和最大脈沖數(shù)量,進(jìn)而選擇PLC 及其相應(yīng)的功用模塊。依據(jù)脈沖頻率能夠斷定PLC 高速脈沖輸出時(shí)需求的頻率,依據(jù)脈沖數(shù)量能夠斷定PLC 的位寬。脈沖當(dāng)量=(步進(jìn)電機(jī)步距角×螺距)/(360×傳動(dòng)速比);脈沖頻率上限=(移動(dòng)速度×步進(jìn)電機(jī)細(xì)分?jǐn)?shù))/脈沖當(dāng)量;最大脈沖數(shù)量=(移動(dòng)間隔×步進(jìn)電機(jī)細(xì)分?jǐn)?shù))/脈沖當(dāng)量。 PLC 對(duì)步進(jìn)電機(jī)的操控首先要建立坐標(biāo)系,能夠設(shè)為相對(duì)坐標(biāo)系,也能夠設(shè)為肯定坐標(biāo)系。坐標(biāo)系的設(shè)置在DM6629 字中,00—03 位對(duì)應(yīng)脈沖輸出0,04—07 位對(duì)應(yīng)脈沖輸出1。設(shè)置為0時(shí),為相對(duì)坐標(biāo)系;設(shè)置為1 時(shí),為肯定坐標(biāo)系。 選用PLC 經(jīng)過步進(jìn)電機(jī)驅(qū)動(dòng)器來操控步進(jìn)電機(jī)的工作,從而到達(dá)了PLC 在步進(jìn)電動(dòng)操控中使用愈加廣泛。例如,在對(duì)單雙軸運(yùn)動(dòng)的操控進(jìn)程中,在操控面板上設(shè)定移動(dòng)間隔、速度和方向等參數(shù)。PLC 讀入這些設(shè)定值后,經(jīng)過運(yùn)算發(fā)生脈沖、方向信號(hào),操控步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng),到達(dá)對(duì)間隔、速度、方向操控的意圖。并經(jīng)過實(shí)測(cè)證明體系工作結(jié)果具有牢靠性、可行性、有效性。
更多直線步進(jìn)電機(jī)參數(shù)知識(shí),請(qǐng)咨詢覃工QQ:176340526